Forschungsbereiche am Technologietransferzentrum Unbemannte Flugsysteme
 Steuerung von Drohnen mit Hilfe von Mixed-Reality-Brillen.
Steuerung von Drohnen mit Hilfe von Mixed-Reality-Brillen.Human-Machine Teaming
 A320 Cockpitsimulator zur Evaluierung von Pilotenassistenzsystemen.
A320 Cockpitsimulator zur Evaluierung von Pilotenassistenzsystemen.Human-Machine Interaction
 Netzwerke von Drohnen
Netzwerke von DrohnenUAV Coordination & Swarming
 Visualisierung einer Formation von Drohnen
Visualisierung einer Formation von DrohnenUAV Coordination & Swarming 2
 Technologietransferzentrum Unbemannte Flugsysteme
Technologietransferzentrum Unbemannte FlugsystemeTechnologietransferzentrum Unbemannte Flugsysteme in Manching
Aktuelle Entwicklungen in zivilen und militärischen Anwendungen zeigen die zunehmende Relevanz fliegender unbemannter Systeme für Mobilität und Sicherheit. Am TTZ widmen wir uns der Entwicklung von Konzepten neuer unbemannter Plattformen, der intelligenten Kontrolle von UAV-Schwärmen sowie der Interaktion von Operateuren mit hochautomatisierten UAVs.
Aktuelle Forschungsbereiche
Wir arbeiten an der Entwicklung neuartiger Konzepte für unbemannte Flugsysteme sowie der operationellen Analyse der Anwendung von UAVs in Logistik und Mobilität.
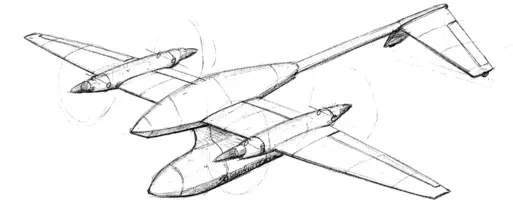
Projekt: Control and regulation of a innovative propulsion system
In diesem Forschungsprojekt untersuchen wir einen einrotoriges Plattformkonzept mit VTOL-Eigenschaften. Ziel ist die Entwicklung einer KI-basierten Regelung zur Stabilisierung des Systems durch gezielte Störung des Schwerpunkts.
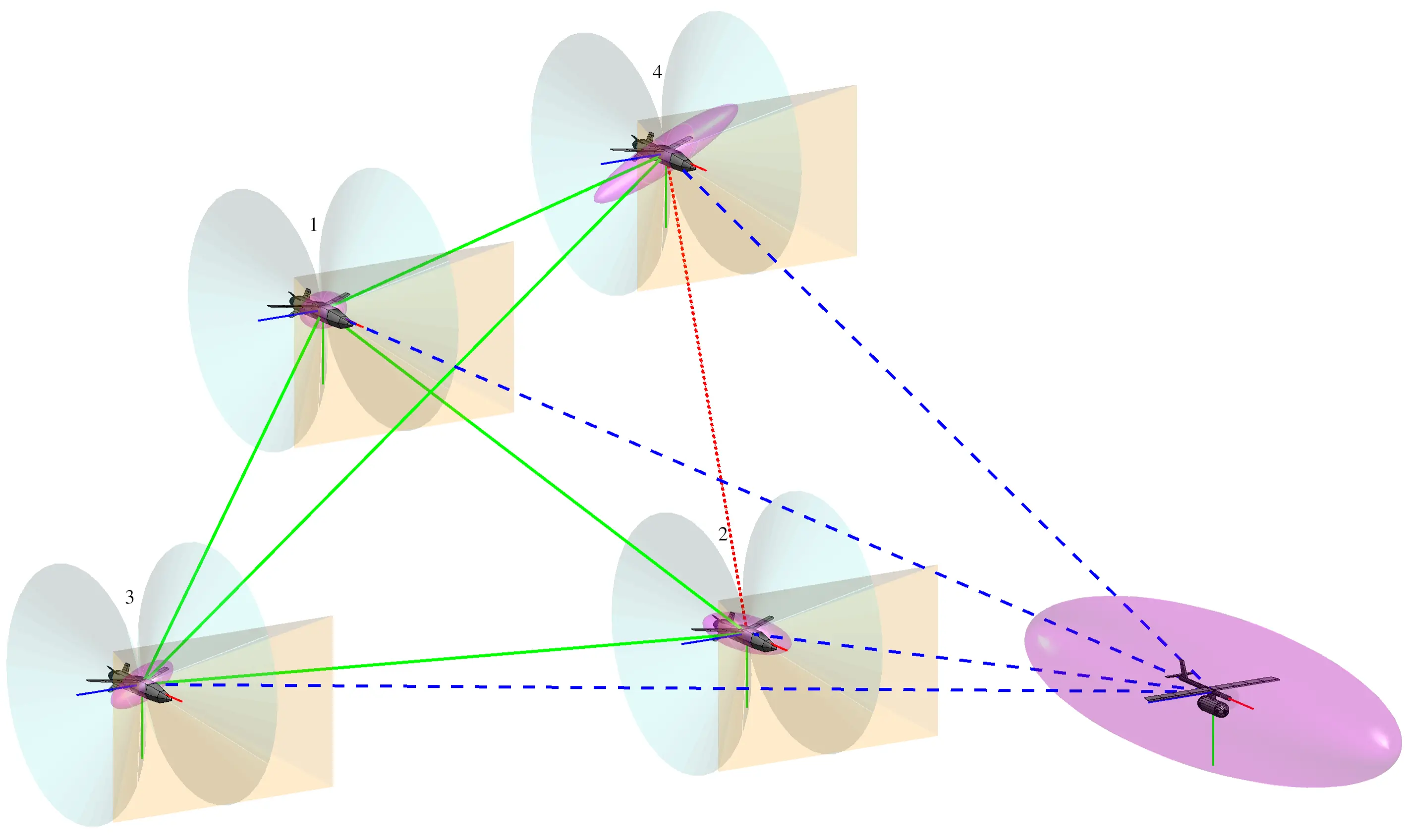

In diesem Forschungsgebiet beschäftigen wir uns mit der Entwicklung von Methoden und Algorithmen zur Kontrolle von Schwärmen unbemannter Luftfahrzeuge (UAVs). Der Einsatz von UAVs in Schwärmen bietet viele Chancen im Bereich Skalierbarkeit, Missionsleistung und Flexibilität. Ziel unserer Projekte ist die Umsetzung von intelligentem Formationsverhalten zum Einsatz von Schwärmen in sicherheitsrelevanten Anwendungen. Dabei kommen Methoden der Regelungstechnik und maschinellen Lernens bspw. zur Zustandsabschätzung oder Pfadplanung zum Einsatz.
Projekt: Intelligente Drohnenkoordination für effiziente automatisierte Luftlogistik (IDEALS)
In der Studie IDEALS wurden operationelle Untersuchungen für den Einsatz von UAV-Schwärmen in der Logistik durchgeführt. Ziel war die Identifikation von technischen Anforderungen sowie die Analyse von operationellen Randbedingungen und Machbarkeit.
Die Steuerung groß angelegter Partikel- oder Robotersysteme stellt aufgrund ihrer hohen Dimensionalität eine erhebliche Herausforderung dar. Anstatt auf dezentrale Methoden zurückzugreifen, setzen wir einen zentralisierten stochastischen Ansatz ein, der eine optimale Steuerung mit einem einzigen koordinierenden Element ermöglicht.
Während viele frühere Arbeiten von “actuated” Robotern ausgehen, konzentriert sich unser Ansatz auf “underactuated systems” und priorisiert energieeffiziente Steuerung.
Durch die Nutzung einer verallgemeinerten Koordinatentransformation basierend auf Euler-Lagrange-Systemen berücksichtigen wir die physikalischen Eigenschaften der Roboter. Unsere Methode lenkt die Roboter effektiv auf ein Ziel zu und minimiert dabei die Positionsvarianz innerhalb eines begrenzten, hindernisfreien Bereichs. Durch fortschrittliche optimale Steuermechanismen zeigen wir in Simulationen die Machbarkeit unseres Ansatzes und ebnen den Weg für effizientere und skalierbarere Robotersysteme.

Durch die technologische Entwicklung im Bereich der UAV-Automation verändert sich die Steuerung von UAVs grundlegend. Die bisher gängige manuelle Kontrolle wird zunehmend durch Systeme mit höherem Automationsgrad ersetzt – möglicherweise sogar aus bemannten Plattformen heraus in sogenannten Manned-Unmanned Teaming (MUM-T) Anwendungen.
Dafür werden neuartige Interaktionskonzepte benötigt, die eine effektive Bedienung hochautomatisierter (Flug-)Systeme ermöglichen und darauf abzielen, unbemannte Plattformen und menschliche Bediener in Teams zusammenarbeiten zu lassen.
Die Forschungsgruppe „Human-Autonomy Teaming & Interaction“ untersucht diese Konzepte in Simulationen und Realflügen. Im Fokus stehen dabei sowohl die Missionsleistung als auch Transparenz und Situationsbewusstsein im Umgang mit intelligenten Softwaresystemen.